Элементы аналитической геометрии
Для того чтобы уметь синтезировать изображения на экране компьютера необходимо предложить способ математического описания объектов в трехмерном пространстве или на плоскости. Окружающий нас мир с точки зрения практических приложений описывают как трехмерное евклидово пространство. Под описанием трехмерного объекта будем понимать знание о положении каждой точки объекта в пространстве в любой момент времени. Положение точек в пространстве удобно описывается с помощью декартовой системы координат.
Для того чтобы ввести декартову систему координат проведем три направленные прямые линии, не лежащие в одной плоскости, которые называются осями, в трехмерном пространстве так чтобы они пересекались в одной точке – начале координат. Выберем на этих осях единицу измерения. Тогда положение любой точки в пространстве будем описывать через координаты этой точки, которые представляют собой расстояния от начала координат до проекций точки на соответствующие оси координат. Проекцией точки на координатную ось называется точка пересечения плоскости, проходящей через заданную точку и параллельной плоскости, образованной двумя другими осями координат. Например, на рис. 1 проекцией точки




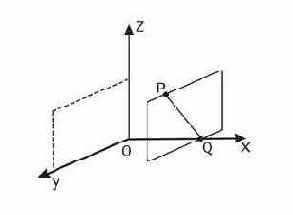
Рис. 1. Нахождение координаты

В общем случае оси системы координат могут располагаться под произвольными, хотя и фиксированными углами друг относительно друга. Для практических расчетов гораздо удобнее когда эти оси расположены взаимно перпендикулярно. Такая система координат называется ортогональной. В ортогональной системе координат проекцией точки
Таким образом, положение в пространстве точки


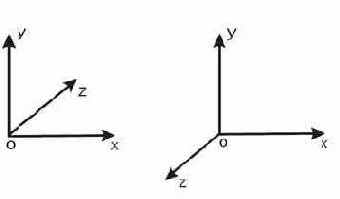
Рис.2. Левосторонняя и правосторонняя системы координат.
Ось

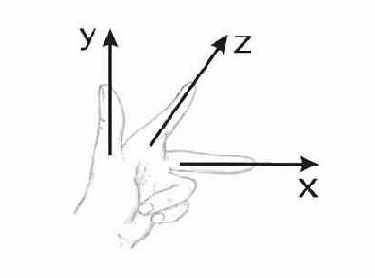
Рис. 3. Определение левосторонней системы координат по левой руке.
Декартовы координаты точек позволяют описывать статичное положение объектов в пространстве. Однако для проведения каких-либо действий над объектами необходимо иметь дополнительные математические конструкции. В качестве одной из таких конструкций применяют радиус-векторы. Радиус-векторы обладают всеми свойствами векторов, но имеют одну особенность: начало радиус-вектора находится всегда в начале координат, а конец радиус-вектора лежит в некоторой точке пространства. Это свойство радиус-векторов позволяет поставить во взаимно однозначное соответствие всем точкам пространства соответствующие им радиус-векторы. Формально это соответствие запишем в следующем виде. Пусть точка





 |



Сложение радиус-векторов



Рассмотрим теперь каким образом можно использовать координаты точек и радиус-векторы для описания прямых и плоскостей в трехмерном пространстве. Под описанием прямой понимаем знание того принадлежит ли точка с заданными координатами нашей прямой или нет. То есть нужно получить некую математическую зависимость или уравнение прямой. Мы получим уравнение прямой двумя способами.
Во-первых, известно, что две различные точки определяют в пространстве прямую. Выберем в пространстве две точки


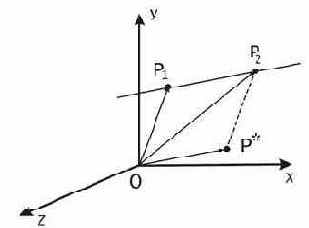
Рис. 4. Вывод уравнения прямой в трехмерном пространстве.
Проведем от точки










Из этого векторного равенства получаем три равенства для соответствующих координат:

Попарно разделив эти уравнения друг на друга для того чтобы избавится от коэффициента

В практических задачах иногда бывает нужно узнать лежит ли некоторая точка, принадлежащая прямой, внутри отрезка, заданного координатами своих концов на данной прямой, или снаружи. Для решения этой задачи перепишем уравнение (1) в следующем виде:

При



Перейдем теперь к выводу уравнения плоскости. Мы сможем получить его тремя путями. Но прежде напомним определение скалярного произведения. Для двух радиус-векторов





так как при раскрытии скобок скалярные произведения перпендикулярных векторов базиса по определению обращаются в ноль.
Используем свойства скалярного произведения для вывода уравнения плоскости. Рассмотрим некоторую плоскость в пространстве и некоторую точку

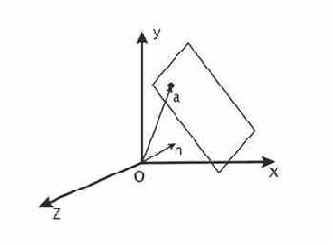
Рис. 5. Вывод уравнения плоскости в трехмерном пространстве.
Возьмем также некоторый радиус-вектор



Так мы уже получили уравнение плоскости. Раскроем скобки и запишем его в более удобном виде:





Известно что плоскость может быть задана тремя точками, лишь бы они не лежали на одной прямой, то есть если они не коллинеарны. Получим уравнение плоскости для трех заданных точек. Для этого рассмотрим определение векторного произведения. Результатом векторного произведения двух векторов












Сведем теперь условия в новой постановке задачи нахождения уравнения плоскости к предыдущему случаю, где мы использовали вектор нормали. Пусть заданы фиксированные векторы

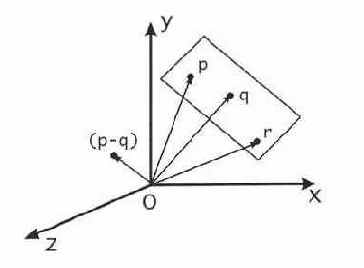
Рис. 6. Вывод уравнения плоскости проходящей через три точки.
Результат векторного произведения любых двух неколлинеарных векторов, параллельных нашей плоскости, будет вектором перпендикулярным плоскости. И как раз такими являются векторы разности





причем в последней скобке вместо вектора
Рассмотрим еще несколько определений и типичных задач, решение которых не должно вызывать замешательств.
Иногда бывает необходимо вычислить длину проекции радиус-вектора не на ось системы координат, а на другой радиус-вектор. Найдем длину проекции вектора

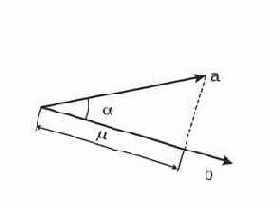
Рис. 7. Проекция вектора


Искомая длина проекции:



Как видно, если длина вектора, на который проецируется другой вектор, равна единице, то длина проекции будет просто равна скалярному произведению этих векторов.
С помощью формулы длины проекции вектора на вектор можно еще одним способом получить уравнение плоскости, если заметить, что длины проекций радиус-векторов, принадлежащих плоскости, на вектор нормали к плоскости всегда равны между собой.
Решим задачу нахождения минимального расстояния от начала координат до плоскости. Очевидно, что это расстояние необходимо откладывать вдоль прямой, определяемой вектором нормали к плоскости. Но для нахождения этого расстояния надо найти сначала точку пересечения прямой с плоскостью. Поэтому решим в общем виде задачу нахождения точки пересечения прямой и плоскости. Пусть искомая точка, или соответствующий радиус-вектор называется x. Тогда эта точка должна одновременно удовлетворять уравнениям прямой и плоскости, например,





Уравнение прямой вдоль вектора нормали к плоскости запишем как



Учитывая это, запишем:

Отсюда искомое расстояние от начала координат до плоскости равно

В том случае когда вектор нормали

Кроме определения положения точек в пространстве радиус-векторы также определяют некоторое направление в пространстве.
Направление, определяемое радиус-вектором, удобно описывать с помощью, так называемых, направляющих косинусов. Пусть радиус-вектор






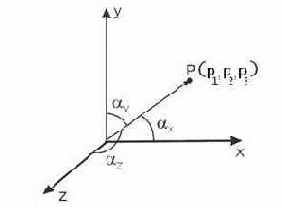
Рис. 8. Направляющие косинусы.
Отсюда, очевидно, вытекают следующие свойства направляющих косинусов:

Направляющие косинусы пропорциональны соответствующим координатам:

а в случае, когда вектор
Рассмотрим далее функциональное представление плоскости. Для этого в уравнении (5) перенесем константу из правой части в левую и запишем функцию трех переменных

Если подставить координаты точки, принадлежащей данной плоскости в это уравнение, то


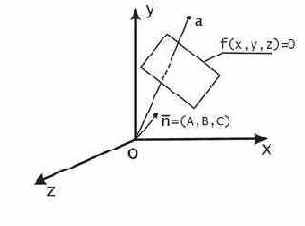
Рис. 9. Функциональное представление плоскости.
Свойство сохранения знака функции
Для этого достаточно лишь подставить значения координат точек в функциональное представление плоскости, определяемой соответствующей гранью и проверить совпадают знаки функции или нет. Аналогичные рассуждения можно проделать и для более простого случая прямой на плоскости. Тогда для любой точки на плоскости можно определить ее нахождение в одной их полуплоскостей на которые прямая делит плоскость. Это свойство используется в следующем примере.
Рассмотрим далее три метода решения классической задачи определения принадлежности точки внутренней или граничной области треугольника. Эта задача имеет, конечно же, много решений, некоторые из которых может придумать и сам читатель. Пусть на плоскости



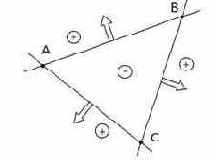
Рис. 10. Внутренняя область треугольника соответствует отрицательным направлениям векторов нормалей.
Через каждую пару вершин треугольника можно провести прямую. Замкнутая область пересечения трех полуплоскостей, образованных этими прямыми есть внутренняя область треугольника. Пользуясь вектором нормали


Следующий метод основан на преобразовании треугольника с помощью операции переноса таким образом чтобы проверяемая точка совпала с началом координат. Поворотом плоскости вокруг начала координат расположим одну (любую) из вершин треугольника на оси

Если же знаки различны, то берем следующую из оставшихся вершин треугольника и поворотом плоскости устанавливаем ее на ось
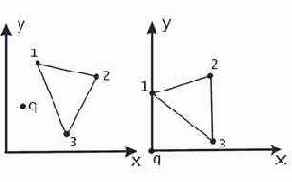
Рис. 11. Точка

Условием принадлежности точки внутренней области треугольника будет несовпадение знаков
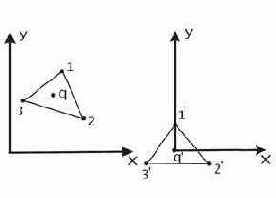
Рис. 12.Точка
Нахождение точки на одной из сторон треугольника легко определяется по несовпадению знаков

Третий из приводимых здесь методов представляется наиболее компактным и скоростным с вычислительной точки зрения. Этот метод был предложен автору Д. Чистяковым в 1999 году. Заметим, что очень просто можно определить принадлежность точки внутренней области треугольника – единичного симплекса, то есть треугольника, образованного точками с координатами





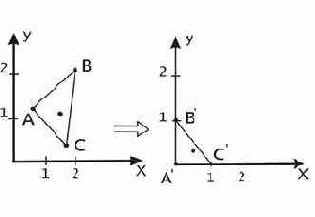
Рис. 13. Приведение произвольного треугольника к единичному симплексу.
После таких преобразований внутренняя и внешняя области треугольника остаются таковыми. Применив такое преобразование к искомой точке, достаточно затем будет определить ее нахождение во внутренней или внешней области симплекса. Найдем такое преобразование. Координаты векторов единичного базиса совпадают с координатами точек


Этого всегда можно добиться параллельным переносом треугольника на вектор







Значит для обратного перехода к единичному базису, (на векторах которого построен симплекс), необходимо найти обратную матрицу:

Умножение радиус-вектора искомой точки на матрицу

